2025/08/22(金)中華USBISP改造版のUSBasp
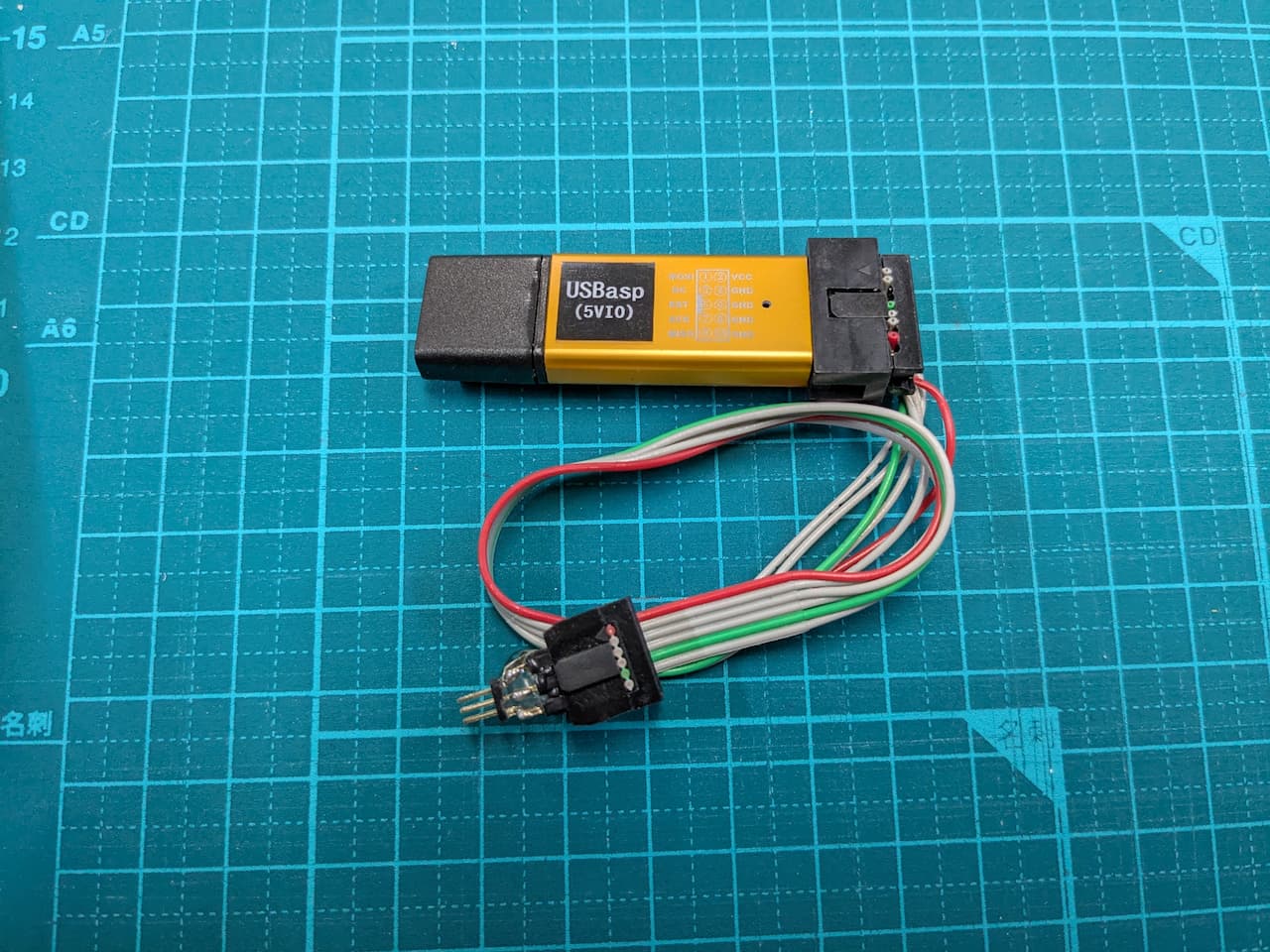
aliexpressや、amazonなのでUSBメモリサイズのコンパクトなAVRライタのUSBISPが売られています。これ、USBaspに似ていますが全くの別物で中華独自のようです。そのままでは使いづらさがあるので、ネット情報にあるUSBasp化改造というものがあります。
参考になるのは、
で、このデバイスに書き込むカスタムUSBaspのリポジトリが
となっています。一応これらを参考に真似すればちゃんとArduino IDEの「USBasp」として「書き込み装置を使って書き込み」で使えるのですがどうも不安定です。素のATMEGA328Pにブートローダを書き込むときにエラーになったり、正式なUSBaspには起こらない、微妙に使えない場面に出くわします。この現象にずっとなんだろな、という曖昧な感覚で納めていたのですが、今回ちゃんと調べたところカスタム版のFWに問題があることがわかりました。
カスタム版のFWは、本家とのピン配置の違いなどを変更して修正したFWになりますがそのほかに一転重要なところを「良い感じに改造したぜ?」(意訳)というコメントともに改造されています。
それは、デフォルト時のSCKクロックスピードで、本家の375kHzから750kHzに変更されていた点です。ArduinoIDEから書き込む場合このSCKクロックを明示的に変更することはできませんので、必然的に750kHzクロックでの書き込みとなります("-B 10" などのオプションを通せない)。新品のATMEGA328Pは内蔵クロック1MHzで動作していますから、間に合わないわけです。
原因を突き止めたので、ソースコード変更してデフォルトクロックを93.75kまでさげてビルドしたものを書き込みました。本家よりも下げた理由は、互換機なんだから低速でもちゃんと書き込める装置としてあるべき、と考えたからです。
長年使ってきたレガシーなAVRの心残りがなくなった気がしました。
2024/07/04(木)GP2Y0A21YKのArduino用軽量ライブラリ
申請に際して
Arduino IDEのライブラリ一覧に自作ライブラリを登録する
を参考にしました。
公開ライブラリのGithubリポジトリは、GP2Y0A21YK_libです。
公式サイトにもGP2Y0A21YK_libから辿れるようになっています。
これが非常に嬉しいですね。
2024/05/16(木)GP2Y0A21YKを簡単な計算式で使う
秋月電子 - シャープ測距モジュール GP2Y0A21YK
スイッチサイエンス - 赤外線近接センサGP2Y0A21YKと接続ケーブル
共立電子産業 - PSD測距センサ[鉛F] GP2Y0A21YK
マイコン側ではADCでアナログ電圧を取得、それを計算して検出した障害物までの距離を測ることができる。この距離算出の計算が少々面倒かつ、ネット上ですぐに見つかるライブラリはpow()関数を使っていたり少々大げさなコードが目立つ。そこで、データシートのグラフから逆数回帰で解析して近似曲線を求め、それを測距の関数化をすることにした。このセンサーは最近のレーザー式とは違って精度がでないので10mm程度の誤差は許容するような使い方をする前提と思われる。(男性用小便器の人体検知センサーなどに使われてそう)
目標となる関数は、y = A + (B/x)とし、係数A, Bを求めればよい。
まずは、グラフから手作業で読み取った値を書き出し。
x=0.4のとき Y=80計算サイトで理論計算すると、 A = -4.82049, B = 34.83012845 となったのでこれを基に、Google関数グラフで係数を微調整していく。
x=0.5のとき Y=70
x=0.6のとき Y=54
x=0.7のとき Y=44
x=0.8のとき Y=37
x=0.9のとき Y=33
x=1.0のとき Y=29
x=1.1のとき Y=26
x=1.2のとき Y=24
x=1.3のとき Y=21
x=1.4のとき Y=20
x=1.5のとき Y=18
x=1.6のとき Y=17
x=1.7のとき Y=15.5
x=1.8のとき Y=14.5
x=1.9のとき Y=14
x=2.0のとき Y=13
x=2.1のとき Y=12
x=2.2のとき Y=11.5
x=2.3のとき Y=11
x=2.4のとき Y=10.5
x=2.5のとき Y=9.5
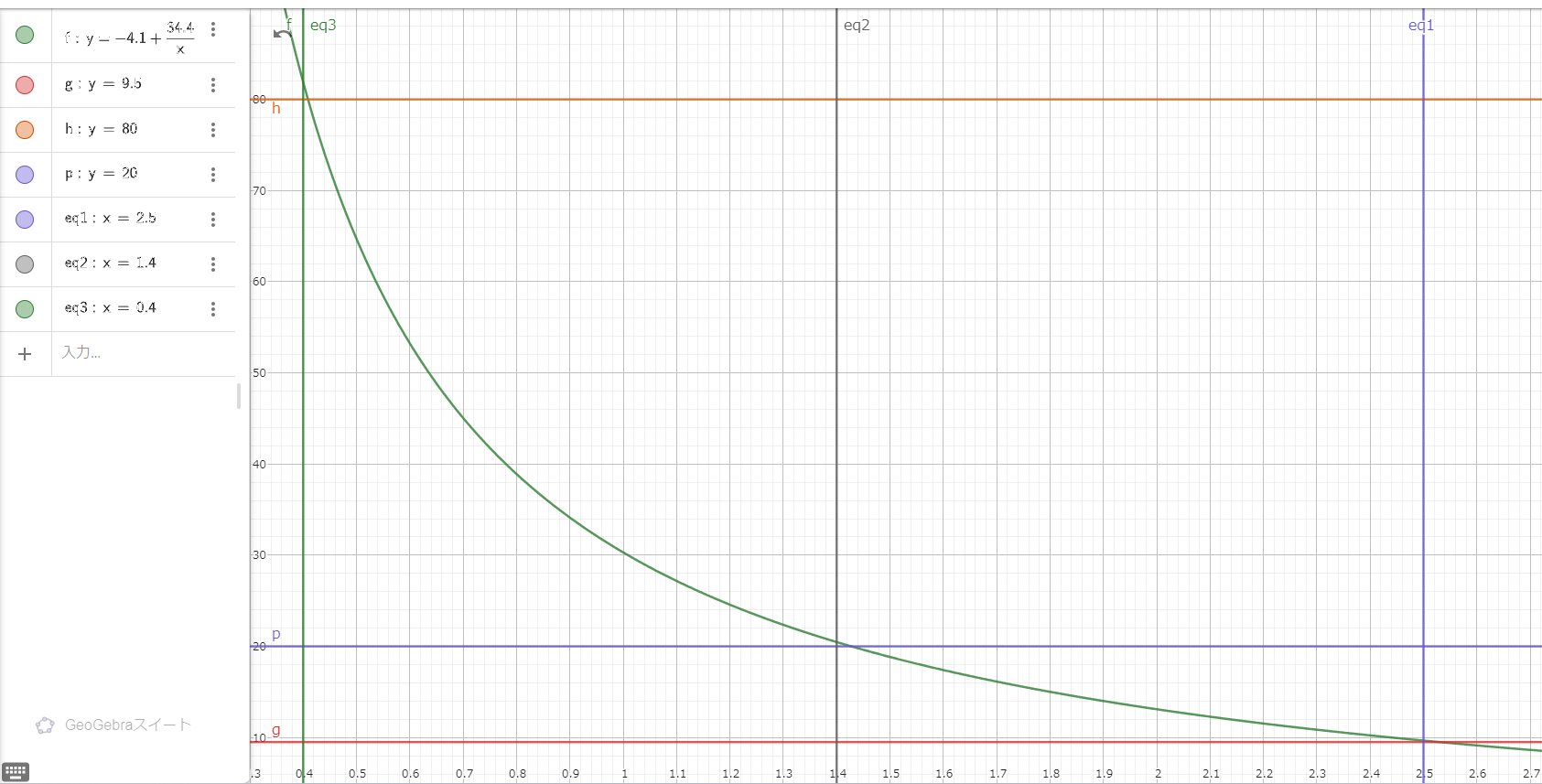
現物合せで、 A = -4.10000, B = 34.4000 となった。
よって算出する関数は、
const double A = -4.1000; const double B = 34.4000; dist = A + B / vol;となる。コード全体は以下の通り、ヘッダーファイルだけで納めてしまっているので.cppはなし。
#ifndef __GP2Y0A_H__
#define __GP2Y0A_H__
//-----------------------------------------
#define DEF_PIN (A3)
#define OPERATING_VOLTAGE (5.0)
#define RESOLUTION (1024.0)
#define BIT_VOLTAGE (OPERATING_VOLTAGE / RESOLUTION)
#define LOW_LIMIT (0.0)
#define HIGH_LIMIT (2.6)
//-----------------------------------------
class GP2Y0A
{
public:
GP2Y0A(uint8_t analog_pin = DEF_PIN)
{
pin = analog_pin;
pinMode(pin, INPUT);
};
~GP2Y0A()
{
};
double distance()
{
int ad = analogRead(pin);
double vol = ad * BIT_VOLTAGE;
double dist = 0.0;
if(LOW_LIMIT < vol && vol < HIGH_LIMIT)
{
// 逆数回帰で解析して近似曲線を求める y = A + (B/x)
// 理論計算で、 A = -4.82049, B = 34.83012845
// 現物合せで、 A = -4.10000, B = 34.4000
const double A = -4.1000;
const double B = 34.4000;
dist = A + B / vol;
}
return dist;
};
private:
uint8_t pin;
};
#endif
また、距離が近すぎると値が化けるので取得したADC値をLOW_LIMITとHIGH_LIMITで範囲を制限している。使うときはグローバル変数で、GP2Y0A *psd;しておいて、Arduinoの場合、setup()関数内で
//PSD init. psd = new GP2Y0A(A3);// example A3 pinあとは、loop()関数は、
void loop()
{
static double kyori;
char buf[16];
//sample of psd sensor
kyori = psd->distance();
dtostrf(kyori, 6, 2, buf);
Serial->println(buf);
delay(100);
}
とでもすれば、そこそこ良い感じの値が読み取れているのがわかる。*1
2024/01/12(金)Arduinoボード 3品種のLDO駆動能力
搭載LDOの最大電流は下記の通り、自作の回路やシールド基板では1割程度余裕を見ておいたほうが良いと思う。
| ボード | 搭載LDO | 最大電流 |
|---|---|---|
| Arduino UNO R3 | LP2985-33DBVR | 150mA |
| Arduino Uno R4 Minima | マイコン内蔵LDO | 100mA |
| Arduino Nano Every | AP2112K-3.3 | 600mA |
がっつり3.3Vが必要な場合はVINから自前でDCDCで作るのが順当。
2023/08/21(月)Arduino Nano Everyの挙動
Arduino Nano Everyになってから、UNO R3と違ってタイマ/カウンタが盛りだくさんになった。
その挙動を調べていて使ってるところ使ってないところなどの確認。
とりあえず起動時のTCA0周りを一覧
TCA0.SINGLE.INTCTRL = 0b0 TCA0.SINGLE.CTRLA = 0b1011 TCA0.SINGLE.CTRLB = 0b11 TCA0.SINGLE.CTRLC = 0b0 TCA0.SINGLE.CTRLD = 0b0 TCA0.SINGLE.CTRLECLR = 0b0 TCA0.SINGLE.CTRLESET = 0b0 TCA0.SINGLE.CTRLFCLR = 0b0 TCA0.SINGLE.CTRLFSET = 0b0 TCA0.SINGLE.EVCTRL = 0b0 TCA0.SINGLE.INTCTRL = 0b0 TCA0.SINGLE.PER = 255 TCA0.SINGLE.CMP0 = 128 TCA0.SINGLE.CMP1 = 128 TCA0.SINGLE.CMP2 = 128TCA0.SINGLE.CTRLCなのですが、起動時は0b0だがtone()実行中は0b111になっています。
比較一致(Compare) CMP2OV CMP1OV CMP0OV 出力ですね。なぜ全部?
あと、この記事がすごく役立ちました。
@CoTechWorks さん
Arduino Nano Everyのタイマー割り込み機能について
この記事を参考に進めています。